JetPack 7.2 brings one-command NemoClaw deployment to Jetson
NVIDIA JetPack 7.2 packages NemoClaw, Jetson agent skills, Yocto support, MIG, and Orin Super Mode for physical AI agents at the edge.

- What happened: NVIDIA announced
JetPack 7.2, adding a Jetson path for one-command NemoClaw deployment.- The release also covers Jetson agent skills, official Yocto support, Jetson Thor
MIG, and Jetson AGX Orin 32GB Super Mode.
- The release also covers Jetson agent skills, official Yocto support, Jetson Thor
- Developer impact: BSP bring-up, memory optimization, and model benchmarking are being packaged as agent-executable edge workflows.
- What to watch: Physical agents are constrained by deterministic latency, reproducible OS images, memory footprint, and isolation for safety workloads.
- NVIDIA's technical blog describes a Thor
MIGsetup with one 12 SM / 1536 CUDA core partition and one 8 SM / 1024 CUDA core partition.
- NVIDIA's technical blog describes a Thor
NVIDIA used its June 1, 2026 COMPUTEX and GTC Taipei news cycle to announce JetPack 7.2 and NemoClaw support on Jetson. A companion NVIDIA Technical Blog puts the developer story in plainer terms: on Jetson devices, teams can deploy NemoClaw workflows with curl -fsSL nvidia.com/nemoclaw.sh | bash, then use Jetson agent skills for Linux customization, memory optimization, and model benchmarking.
This is not a new foundation model announcement. NVIDIA has recently tied together Nemotron 3 Ultra, OpenShell, NemoClaw, and CUDA-X agent skills for servers and workstations. JetPack 7.2 moves that execution stack down to Jetson boards: robots, industrial inspection cameras, smart retail systems, traffic infrastructure, drones, and other devices where power, memory, latency, and field update constraints matter more than a leaderboard headline.
NVIDIA's phrase for the release is that agentic AI is "getting physical." In practice, that means agents leave the browser, IDE, or cloud workflow and start interacting with cameras, sensors, robot arms, vehicles, and industrial control loops. A failed code review agent can submit a bad pull request that a human closes. A delayed defect inspection pipeline or a robot control workflow can affect production lines, safety interlocks, and field operations.
Five changes inside JetPack 7.2
NVIDIA frames JetPack 7.2 around five pieces: NemoClaw one-command deployment, Jetson agent skills, Multi-Instance GPU on Jetson Thor, official Yocto Project support, and Jetson AGX Orin 32GB Super Mode. These features look separate on a release checklist, but together they map closely to the jobs required to ship agents on edge hardware.
| JetPack 7.2 item | NVIDIA description | Field impact |
|---|---|---|
| NemoClaw deployment | Run agent workflows on Jetson with a one-line command | Lower initial setup cost for robot and vision-agent prototypes |
| Jetson agent skills | Linux customization, memory optimization, model benchmarking | Turn BSP and performance tuning into repeatable workflows |
| Thor MIG | Split mixed-criticality workloads across two GPU instances | Separate control loops and generative AI inference on one SoC |
| Official Yocto support | Validated recipes, reference images, OE4T roadmap participation | Improve reproducibility and attack-surface control for product Linux images |
| Orin 32GB Super | Raise 200 TOPS to 241 TOPS, with a claimed 45% module cost reduction | Create more room for LLM and VLM workloads on existing Orin-class devices |
The agent skills are the most important developer signal in that table. NVIDIA does not describe them as abstract prompt packs. The technical blog defines a skill as repeatable, agent-executable instructions that specify which tools to call, what outputs to generate, and how to verify the result. That puts the format somewhere between a Markdown operations guide and a shell automation script. Instead of asking field engineers to repeat BSP configuration, kernel reservations, redundant process cleanup, and model benchmarks by hand, NVIDIA wants agents to run those procedures consistently.
The first category is Jetson Linux customization. NVIDIA says the workflow can create a BSP for a custom carrier board and configure I/O, clocks, fan control, power profiles, and other device-specific settings. That is far from a typical web developer workflow, but for teams shipping Jetson in a product, BSP bring-up can sit directly on the release schedule. NVIDIA claims work that historically took weeks can move toward days through these skills.
The second category is memory optimization. On edge hardware, memory is not just a spec sheet line. If a workload can move from a 16 GB module to an 8 GB module, the bill of materials, thermal design, power envelope, and supply options all change. NVIDIA points to bootloader memory carveouts, kernel memory reservations, and removal of redundant user-space processes. That is deployment engineering and embedded Linux work, not LLM prompt engineering.
The third category is model benchmarking. For a robot or industrial camera, choosing a model does not reduce to choosing the largest model with the best benchmark score. The target device, camera stream, batch size, latency budget, thermal envelope, and safety processes all interact. NVIDIA's skill includes Jetson diagnostics and inference optimization so teams can find the most efficient model configuration on a specific device. This is where MLOps meets embedded QA.
NemoClaw moves from servers to Jetson
NemoClaw has appeared across several recent NVIDIA announcements. Earlier GTC messaging presented it as a reference stack for running OpenClaw-based agents with OpenShell runtime controls, privacy controls, and security controls. JetPack 7.2 moves the same name into the Jetson deployment path. NVIDIA's JetPack page also describes JetPack 7 as agentic-ready through NemoClaw and purpose-built Jetson agent skills.
The difference between a server agent and a Jetson agent is the runtime environment. Servers push scaling, cost attribution, and tenancy toward the top of the risk list. Jetson deployments start with physical interaction, sensor timing, memory footprint, offline or constrained networks, and long-lived operating-system images. The release is less about "NemoClaw also runs on Jetson" and more about aligning the OS, GPU partitioning, BSP work, benchmarking, and Yocto pipeline so NemoClaw can be deployed on field hardware.
NVIDIA's corporate blog lists Solomon, Advantech, Rebotnix, Spingence, SandStar, NoTraffic, Hexagon Robotics, and Zipline as examples. Solomon is described as coordinating reasoning, perception, sensor fusion, locomotion, and manipulation in humanoid robots. Advantech is described as building a factory brain with NemoClaw, Nemotron 3, and Jetson Thor for robot fleet management, defect detection, and autonomous decision-making.
Those examples are closer to an ecosystem map than an independently verified benchmark set. They still help developers understand the initial target market. Jetson-based agents are not primarily about browser automation or document summarization. They begin with vision pipelines and physical decisions. Rebotnix smart city cameras, Spingence defect agents, SandStar smart retail, and NoTraffic traffic management all assume cameras, sensors, and real-time operations.
Why Thor MIG matters
MIG support on Jetson Thor is the most hardware-specific part of this release. NVIDIA says the integrated Blackwell GPU can be split into two isolated GPU instances with dedicated compute, cache, and memory bandwidth. One partition is described as a 12 SM, 1536 CUDA core instance for inferencing, rendering, visualization, and general CUDA workloads. The other is an 8 SM, 1024 CUDA core instance for robotics, control, perception, and safety-critical workloads.
Those numbers matter because agents are not steady workloads. A vision-language reasoning step or task planner can suddenly begin a long inference path and consume resources that perception, sensor fusion, or motion planning expected to have available. NVIDIA pairs MIG with a preemptible real-time kernel and deterministic execution language for mixed-criticality systems. Robot control loops need worst-case latency management, not an average claim that the system is usually fast.
In cloud servers, MIG is usually discussed through tenancy and GPU utilization. On Jetson Thor, it reads more like a product safety and control-quality feature. Generative AI inference or visualization can run on one partition while perception or safety monitoring receives fixed resources on another. NVIDIA also says containers and services can be assigned to a specific MIG partition through CUDA Runtime controls and NVIDIA Container Toolkit.
Yocto support targets products, not demos
Official Yocto Project support is less flashy than one-command NemoClaw deployment, but it is a significant productization step. NVIDIA says it will provide validated recipes and reference images for Jetson developer kits, and contribute to the OE4T layer roadmap, CI/CD, SQA, and release process. Yocto is the embedded Linux ecosystem many teams use to build custom distributions with only the drivers, services, and libraries required for a device.
NVIDIA breaks Yocto's benefits into customizability, reproducibility, and an open ecosystem. Customizability means not shipping a broad Ubuntu L4T image when a smaller product image can reduce footprint and unnecessary services. Reproducibility means rebuilding the same image repeatedly and getting the same result. In medical, industrial, logistics, and transportation deployments, that line item becomes operational cost and audit burden.
Agents also change the update problem. A browser extension or SaaS agent can often be rolled back on the server side. Jetson devices installed in factories, roads, warehouses, or drones need fleet updates, secure OTA, and recovery paths. The JetPack page lists secure boot, disk encryption, runtime integrity, fTPM, and secure OTA among Jetson Linux security features because physical agents inherit the deployment discipline of embedded systems.
Orin 32GB Super changes the memory math
JetPack 7.2 also adds Super Mode for Jetson AGX Orin 32GB. NVIDIA says GPU frequency rises from 930 MHz to 1.3 GHz and the power envelope expands to 60 W, increasing AI performance from 200 TOPS to 241 TOPS. NVIDIA positions this as a way to approach AGX Orin 64GB performance at a lower module cost, using a 45% cost-reduction claim in the technical blog.
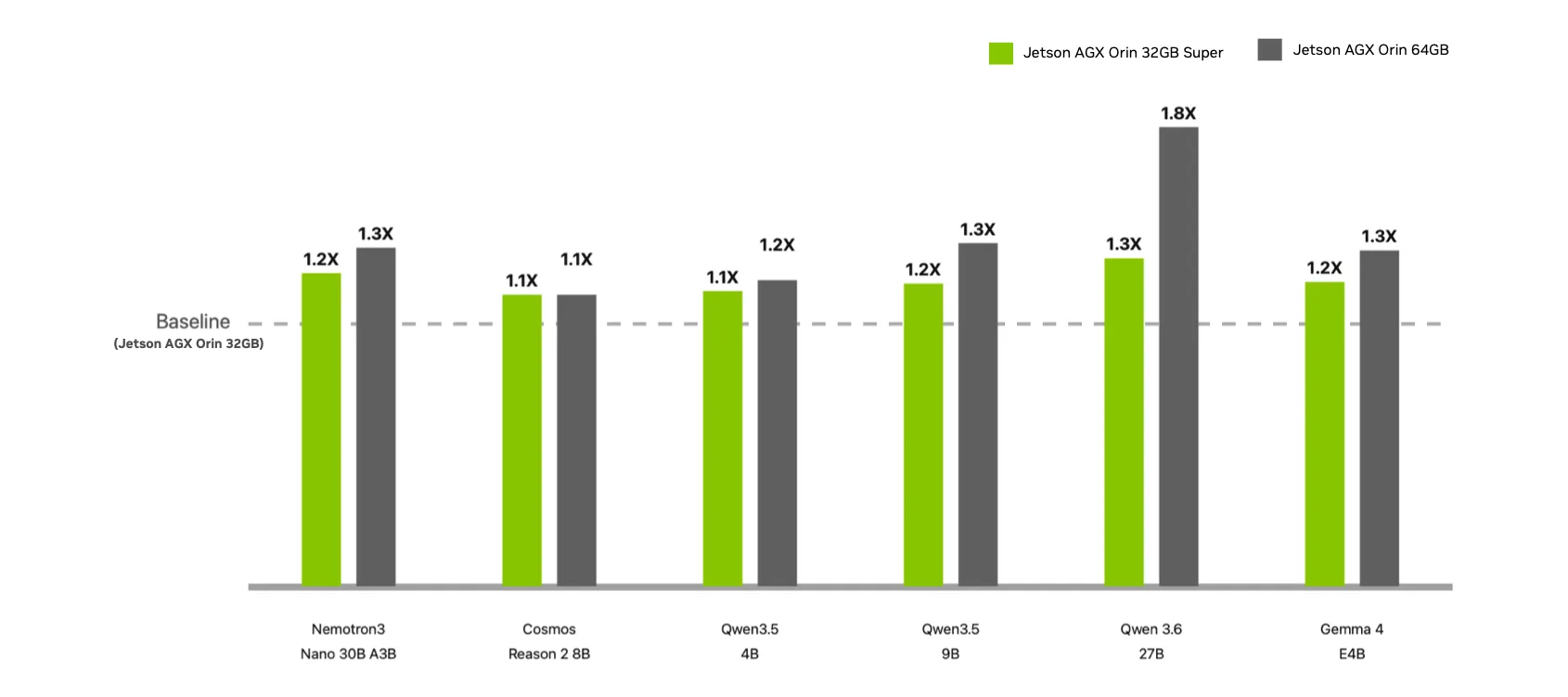
The model table in the technical blog makes the tradeoff more concrete. Nemotron3 Nano 30B A3B is listed at 31 tokens/sec on Jetson AGX Orin 32GB baseline, 37 tokens/sec on 32GB Super, and 40 tokens/sec on 64GB. Qwen 3.6 27B is listed at 4, 5, and 7 tokens/sec. Gemma 4 E4B is listed at 25, 29, and 32 tokens/sec. These numbers look small next to server LLM benchmarks, but they feed directly into the cost model for local reasoning inside a camera or robot.
SandStar's example points in the same direction. NVIDIA says SandStar runs AI vending and smart retail operations with Jetson Orin NX and NemoClaw, and achieved roughly 40% memory optimization to move from a 16 GB device to an 8 GB device. NoTraffic is described as reducing memory usage by 29% through static compilation and targeted kernel pruning of CUDA library overhead. Those are vendor case-study numbers, not independent measurements, but they show the thing NVIDIA is selling: physical AI agents are bottlenecked by memory and packaging as much as model APIs.
Questions for teams evaluating JetPack 7.2
The teams most likely to adopt JetPack 7.2 early are building robots, industrial inspection systems, embedded AI appliances, or edge vision products. For general web and app teams, the release can feel distant. For agent developers, it still establishes a useful boundary: production agents may require hardware resource partitioning and OS image reproducibility, not just GitHub permissions and token budgets.
The first question is the runtime boundary. Teams need to know how far NemoClaw and OpenShell control tools, network access, filesystem access, and model routing. Jetson devices create a more complicated permission model than a cloud sandbox because offline operation, field debugging, and physical actuators are involved. If an agent can adjust a vision pipeline, restart a process, or change device configuration, the approval unit and audit log format need to be explicit.
The second question is skill verification. It helps that Jetson agent skills are derived from NVIDIA documentation and design guides, but field hardware varies. Carrier boards, sensor mixes, power budgets, thermal designs, kernel modules, and regulatory requirements differ by product. The product team still owns the hardware-in-the-loop tests that validate BSP settings, memory tuning, and benchmark results produced by an agent.
The third question is the update strategy. Yocto support is a strong start for reproducible images, but an agent runtime introduces multiple update tracks: model updates, skill updates, policy updates, and OS image updates. Teams have to decide whether those ship through one OTA bundle or separate channels, and how to roll back to a prior image and policy if a field failure appears.
The fourth question is the cost model. NVIDIA's memory optimization story and Orin 32GB Super claim point toward running more workloads on smaller or existing hardware. Tokens per second are only one input. Camera count, frame rate, safety margin, thermal throttling, on-device storage, operator intervention cost, and fleet management cost all matter. A 60 W Super Mode also forces teams to recalculate power and thermal envelopes.
Server agents and physical agents split apart
Most 2026 agent news has centered on IDEs, browsers, GitHub, and cloud workflows. JetPack 7.2 uses the same word, but the evaluation criteria are different. Cloud coding agents are measured through task success, pull-request merge rate, token cost, and repository permissions. Jetson physical agents are measured through latency jitter, memory footprint, deterministic partitioning, OS reproducibility, and hardware bring-up time.
That split changes model competition as well. Server agents foreground model names from OpenAI, Anthropic, Google, xAI, Mistral, and others. Physical devices bind the model to a board support package, CUDA stack, sensor SDK, vision pipeline, OTA mechanism, and safety requirements. NVIDIA is packaging NemoClaw and Jetson agent skills together in JetPack 7.2 because a model by itself does not ship a robot.
At the time of the Korean article's research, the NVIDIA technical blog showed Discuss (0), and no large Hacker News thread around JetPack 7.2 itself was found. Public community validation is still limited. Reading the release as "physical AI agents are solved" would be too broad. A narrower read is more useful: NVIDIA is reframing long-standing Jetson work around BSPs, memory, benchmarking, Yocto, and GPU partitioning as the development surface for agent-era edge products.
The next checks are concrete. Do Jetson agent skills produce repeatable results on custom hardware bring-up? Do NemoClaw and OpenShell absorb the permission, audit, and rollback requirements of physical devices? Do Orin 32GB Super and Thor MIG hold thermal, power, and latency budgets for vision-language agent workloads at product quality? JetPack 7.2 is newsworthy because those evaluation points are now explicit.